 จีนออกข้อกำหนด L3/L4 ใหม่? การปรับกลยุทธ์ครั้งนี้ได้รับการยืนยันอย่างเป็นทางการเมื่อหน่วยงานกำกับดูแลเผยแพร่ร่างมาตรฐานบังคับระดับชาติฉบับแรกสำหรับการขับขี่อัตโนมัติขั้นสูง เมื่อวันที่ 16 มิถุนายน 2026 กระทรวงอุตสาหกรรมและเทคโนโลยีสารสนเทศ (MIIT) ได้เปิดเผยร่างอนุมัติเพื่อรับฟังความคิดเห็นจากสาธารณชน โดยมีกำหนดเริ่มใช้งานจริงในวันที่ 1 กรกฎาคม 2027 ซึ่งถือเป็นการสิ้นสุดยุคของการโฆษณาที่คลุมเครือและเป็นการวางเกณฑ์มาตรฐานความปลอดภัยที่เข้มงวด สำหรับนักพัฒนาและวิศวกรยานยนต์ทั่วโลก การบังคับใช้มาตรฐาน L3/L4 ในจีนนี้แสดงให้เห็นว่าเทคโนโลยีการนำทางของยานยนต์ไร้คนขับได้ก้าวเข้าสู่กรอบการกำกับดูแลที่ต้องอาศัยหลักฐานความปลอดภัยที่พิสูจน์ได้ก่อนที่จะนำยานพาหนะเข้าสู่ตลาด
จีนออกข้อกำหนด L3/L4 ใหม่? การปรับกลยุทธ์ครั้งนี้ได้รับการยืนยันอย่างเป็นทางการเมื่อหน่วยงานกำกับดูแลเผยแพร่ร่างมาตรฐานบังคับระดับชาติฉบับแรกสำหรับการขับขี่อัตโนมัติขั้นสูง เมื่อวันที่ 16 มิถุนายน 2026 กระทรวงอุตสาหกรรมและเทคโนโลยีสารสนเทศ (MIIT) ได้เปิดเผยร่างอนุมัติเพื่อรับฟังความคิดเห็นจากสาธารณชน โดยมีกำหนดเริ่มใช้งานจริงในวันที่ 1 กรกฎาคม 2027 ซึ่งถือเป็นการสิ้นสุดยุคของการโฆษณาที่คลุมเครือและเป็นการวางเกณฑ์มาตรฐานความปลอดภัยที่เข้มงวด สำหรับนักพัฒนาและวิศวกรยานยนต์ทั่วโลก การบังคับใช้มาตรฐาน L3/L4 ในจีนนี้แสดงให้เห็นว่าเทคโนโลยีการนำทางของยานยนต์ไร้คนขับได้ก้าวเข้าสู่กรอบการกำกับดูแลที่ต้องอาศัยหลักฐานความปลอดภัยที่พิสูจน์ได้ก่อนที่จะนำยานพาหนะเข้าสู่ตลาด
การวิเคราะห์กรอบการทำงานด้านการขับขี่อัตโนมัติของจีน: ข้อบังคับความปลอดภัยจาก MIIT
การยกระดับมาตรฐาน GB/T 44721: จากแนวทางปฏิบัติโดยสมัครใจสู่การบังคับเข้าสู่ตลาด
มาตรฐานใหม่ที่มีชื่อว่า ยานยนต์เชื่อมต่ออัจฉริยะ – ข้อกำหนดด้านความปลอดภัยสำหรับระบบขับขี่อัตโนมัติ ถือเป็นการอัปเกรดครั้งสำคัญจากแนวทางเดิม โดยร่างกฎหมายนี้จะเข้ามาแทนที่มาตรฐานเดิม GB/T 44721—2024 ที่เป็นเพียงการแนะนำโดยสมัครใจ ให้กลายเป็นกฎระเบียบระดับชาติที่ต้องปฏิบัติตาม
ดังนั้น การปฏิบัติตามกฎนี้จึงไม่ใช่ทางเลือกสำหรับผู้ผลิตรถยนต์อีกต่อไป รถยนต์โดยสารหรือรถบรรทุก (หมวด M และ N) ที่ไม่ผ่านเกณฑ์ข้อกำหนดเหล่านี้จะถูกระงับการผลิต การนำเข้า และการจำหน่ายโดยเด็ดขาด
อ้างอิงจาก ข่าวอัปเดตจาก IT Home ช่วงเวลาการรับฟังความคิดเห็นสาธารณะจะเริ่มตั้งแต่วันที่ 17 มิถุนายน ถึง 24 มิถุนายน 2026 การเปลี่ยนผ่านสู่ระบบบังคับนี้บีบให้อุตสาหกรรมต้องเปลี่ยนความสนใจจากการอัปเดตซอฟต์แวร์ผิวเผินไปสู่การวิศวกรรมความปลอดภัยที่เข้มงวดและตรวจสอบได้
เครื่องมือจัดการกรณีความปลอดภัย (Safety Case): การบังคับใช้โปรโตคอลการพิสูจน์หลักฐาน
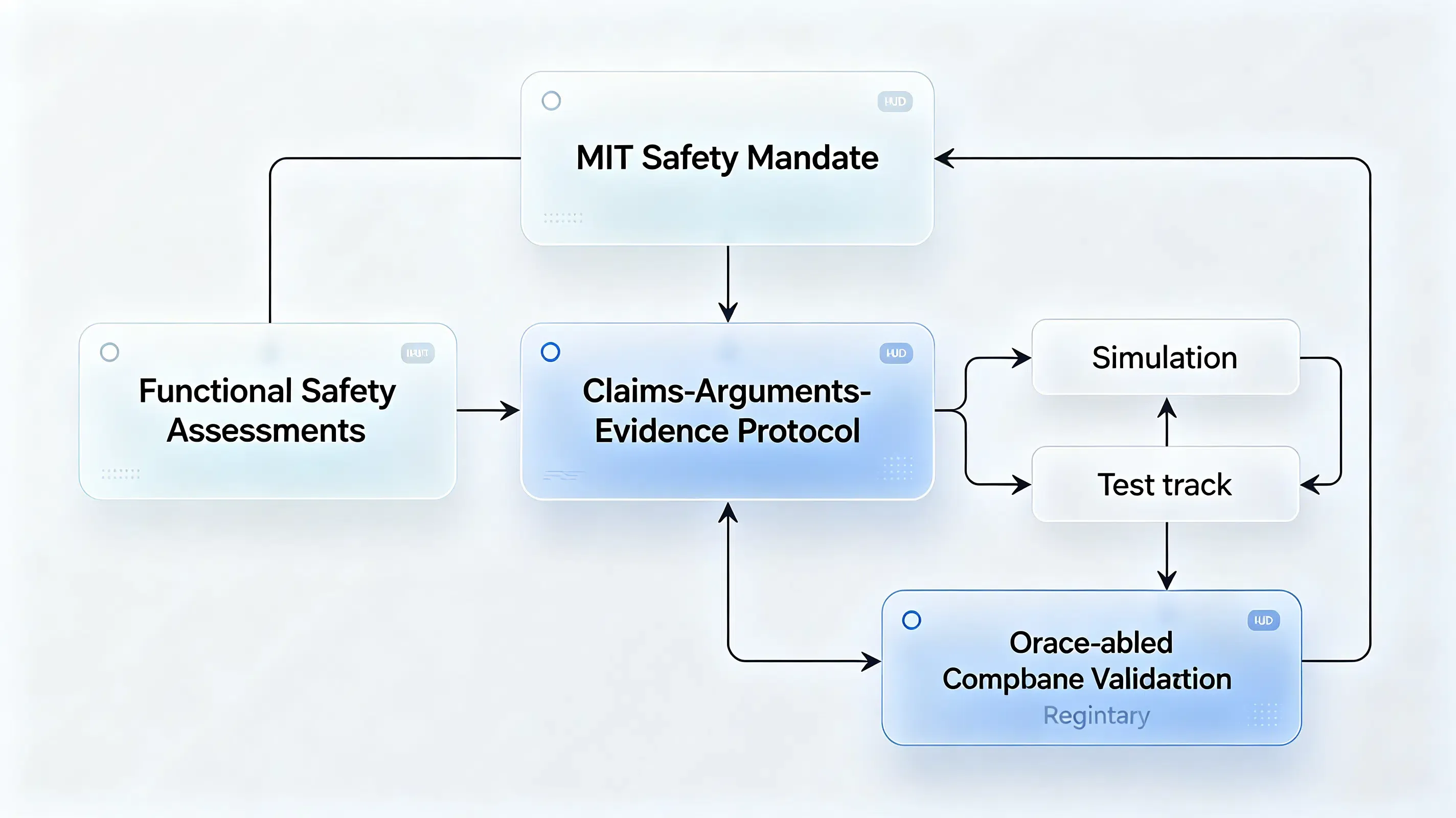
เพื่อบังคับใช้มาตรฐานนี้ กรอบการกำกับดูแลได้กำหนดกลไก "Safety Case" (ระบบจัดเก็บข้อมูลความปลอดภัย) โดยผู้ผลิตรถยนต์จะต้องรวบรวมเอกสารที่ครอบคลุมเพื่อพิสูจน์ว่าระบบขับขี่อัตโนมัติ (ADS) ของตนไม่มีความเสี่ยงที่ไม่สมเหตุสมผล
โดยเฉพาะอย่างยิ่ง Safety Case จะใช้สถาปัตยกรรม "ข้อกล่าวอ้าง-ข้อโต้แย้ง-หลักฐาน" (Claims-Arguments-Evidence) ที่เข้มงวด ผู้ผลิตจะต้องสนับสนุนการอ้างสิทธิ์ความปลอดภัยทุกประการด้วยข้อมูลเชิงประจักษ์ รวมถึงการวิเคราะห์อันตราย การประเมินความปลอดภัยเชิงฟังก์ชัน และขอบเขตการออกแบบการใช้งาน (ODD)
ยิ่งไปกว่านั้น การอัปเดตซอฟต์แวร์แบบไร้สาย (OTA) ที่เกี่ยวข้องกับความปลอดภัยทั้งหมด จะต้องมีการแก้ไขเอกสารประกอบในทันที กรอบการทำงานแบบครบวงจรนี้จะรวมการจำลอง การทดสอบในสนาม และการวิ่งบนถนนจริงเข้าไว้ในทะเบียนการปฏิบัติตามกฎที่ตรวจสอบย้อนกลับได้
ระบบตรวจสอบการทำงานร่วมกับมนุษย์: การตรวจวัดแบบสามชั้นและการควบคุมความเสี่ยงขั้นต่ำ
สำหรับระบบอัตโนมัติแบบมีเงื่อนไขระดับ L3 มาตรฐานนี้มุ่งเน้นไปที่กระบวนการส่งต่อการควบคุมระหว่างระบบและมนุษย์ โดยยานพาหนะจะต้องดำเนินการตามโปรโตคอล "การตรวจสอบสามชั้น" (Triple Monitoring) อย่างต่อเนื่อง
ระบบจะต้องตรวจสอบการมีอยู่ของผู้ขับขี่ การคาดเข็มขัดนิรภัย และความสนใจของผู้ขับขี่แบบเรียลไทม์ หากระบบตรวจพบว่าผู้ขับขี่วอกแวก จะต้องเริ่มต้นลำดับการแจ้งเตือนหลายขั้นตอน ทั้งภาพ เสียง และแรงสั่นสะเทือน
ที่สำคัญ หากผู้ขับขี่ไม่สามารถกลับมาให้ความสนใจได้ภายใน 15 วินาที รถจะต้องเข้าสู่โหมดการเคลื่อนที่เพื่อความปลอดภัยขั้นต่ำ (MRM) โดยที่ความเร็ว 120 กม./ชม. ระบบต้องสามารถตรวจจับสิ่งกีดขวางข้างหน้าได้ในระยะอย่างน้อย 130 เมตรเพื่อให้มีเวลาตอบสนองที่เพียงพอ
การสำรองระบบอัตโนมัติ: การควบคุม MRM ที่เข้มงวดและการยกเลิกการควบคุมจากระยะไกล
ในทางกลับกัน ระบบอัตโนมัติระดับสูง L4 กำหนดให้ระบบต้องจัดการสถานการณ์ฉุกเฉินทั้งหมดโดยปราศจากการแทรกแซงของมนุษย์ มาตรฐานนี้ห้ามไม่ให้ระบบพึ่งพาการช่วยเหลือจากระยะไกลเพื่อแก้ไขงานขับขี่เชิงพลวัตในระหว่างเหตุฉุกเฉินอย่างเด็ดขาด
ดังนั้น ยานพาหนะจะต้องนำทางผ่านสิ่งกีดขวางที่ไม่คาดคิด ระบบเซ็นเซอร์ขัดข้อง หรือสภาพอากาศเลวร้ายได้อย่างอิสระโดยสมบูรณ์ โดยผู้ควบคุมระยะไกลจะจำกัดบทบาทไว้เพียงการแนะนำเส้นทางระดับสูงเท่านั้น
เพื่อรองรับความเป็นอิสระนี้ ระบบ L4 จะต้องประกอบด้วยสถาปัตยกรรมฮาร์ดแวร์ที่มีความซ้ำซ้อนสูง หากส่วนประกอบสำคัญล้มเหลว รถจะต้องดำเนินการตามโปรโตคอล MRM ที่เข้มงวด โดยเข้าจอดไหล่ทางอย่างปลอดภัยหรือหยุดนิ่งภายในเลนโดยไม่ก่อให้เกิดอันตรายต่อการจราจร
การลบล้างความเชื่อผิดๆ เกี่ยวกับ Lidar: ระหว่างการรวมเซ็นเซอร์และการมองเห็นแบบบริสุทธิ์
ในขณะเดียวกัน ข้อมูลจำเพาะได้หักล้างข้อเรียกร้องที่แชร์กันอย่างกว้างขวางเกี่ยวกับข้อบังคับด้านเซ็นเซอร์ โดยเฉพาะอย่างยิ่ง ร่างมาตรฐานอย่างเป็นทางการของ MIIT ไม่ได้ระบุบังคับใช้เซ็นเซอร์ Lidar สำหรับระบบอัตโนมัติระดับ L4 อย่างชัดเจน
ในความเป็นจริง มาตรฐานนี้ยังคงมีความเป็นกลางทางเทคโนโลยี โดยอนุญาตให้ใช้สถาปัตยกรรมแบบการมองเห็นบริสุทธิ์ (Pure-vision) ได้หากผ่านเกณฑ์ความปลอดภัยที่เข้มงวด อย่างไรก็ตาม มาตรฐานได้เพิ่มข้อกำหนดการชดเชยประสิทธิภาพการรับรู้ (degradation compensation) เข้ามาด้วย
ข้อกำหนดนี้บังคับให้ระบบการรับรู้ต้องคงความแม่นยำในการติดตามเป้าหมายไว้ได้แม้ในสภาวะแสงจ้า หมอกหนา หรือฝนตกหนัก แม้ว่าจะไม่ได้ระบุชื่อ Lidar โดยตรง แต่เกณฑ์ประสิทธิภาพระดับสูงนี้มีแนวโน้มที่จะบีบให้ผู้ผลิตหันมาใช้ระบบรวมเซ็นเซอร์หลายประเภท (Multi-sensor fusion) ซึ่งการรวมกล้องเข้ากับเรดาร์หรือ Lidar ยังคงเป็นวิธีปฏิบัติที่เหมาะสมที่สุดในการผ่านเกณฑ์มาตรฐานด้านสิ่งแวดล้อมเหล่านี้
ช่องว่างของการกำหนดเส้นทาง: การเปลี่ยนพารามิเตอร์การเปลี่ยนทิศทางภายใต้ทะเบียน DSSAD แบบอัตโนมัติ
การข้ามขั้นตอนการคลิกด้วยตนเองของผู้ใช้
ในขณะที่นักพัฒนาใช้การสร้างโค้ดอย่างรวดเร็วเพื่อปรับใช้แอปพลิเคชันขนาดเล็กจำนวนมาก เว็บมือถือก็กำลังเผชิญกับการไหลบ่าของผลิตภัณฑ์ที่เหนือความคาดหมาย อย่างไรก็ตาม ปริมาณซอฟต์แวร์ที่เพิ่มขึ้นอย่างมหาศาลนี้กลับมาพร้อมกับการเลือนหายไปของส่วนติดต่อผู้ใช้แบบดั้งเดิม
เมื่อระบบอัตโนมัติทำงานบน API เบื้องหลังทั้งหมด เส้นทางการใช้งานของผู้ใช้แบบเดิมที่เน้นมนุษย์ก็หายไป การเปลี่ยนแปลงนี้เห็นได้ชัดเจนในระบบจัดเก็บข้อมูลสำหรับการขับขี่อัตโนมัติ (DSSAD) ที่เพิ่งได้รับการบังคับใช้
ระบบ DSSAD จะต้องบันทึกสถานะอัตโนมัติที่สำคัญทั้งหมดและขั้นตอนการส่งมอบการควบคุมแบบเรียลไทม์ เนื่องจากกระบวนการสื่อสารระหว่างเครื่องจักรเหล่านี้ข้ามขั้นตอนการคลิกของมนุษย์ จึงทำให้เกิดช่องว่างในการกำหนดเส้นทางขึ้น
การสูญเสียพารามิเตอร์ในบันทึกข้อมูลอัตโนมัติ
โดยเฉพาะอย่างยิ่ง เมื่อตัวแทนในรถเรียกใช้ระบบนำทางหรือบริการผู้โดยสาร พารามิเตอร์การเปลี่ยนทิศทางในระดับเบราว์เซอร์แบบเดิมจะถูกตัดออก กลไกการติดตามแบบเดิมไม่สามารถจับคู่แหล่งที่มาของธุรกรรมข้ามรันไทม์ระหว่างรถยนต์และมือถือได้
ผลที่ตามมาคือ แพลตฟอร์มการวัดผลบนมือถือได้รับแพ็คเกจข้อมูลที่ว่างเปล่า การสูญเสียพารามิเตอร์นี้สร้างวิกฤตด้านการระบุแหล่งที่มา (Attribution) ทำให้นักพัฒนาสูญเสียความสามารถในการติดตามแหล่งที่มาของผู้ใช้ และไม่สามารถเพิ่มประสิทธิภาพวงจรการแปลงหรือตรวจสอบช่องทางการแนะนำได้
สถาปัตยกรรมอ้างอิง: การรักษาความปลอดภัยข้อมูลเมตาข้ามรันไทม์
การสร้างระบบจัดการพารามิเตอร์ใหม่
เพื่อเชื่อมช่องว่างการกำหนดเส้นทางเชิงความหมายนี้ สถาปนิกซอฟต์แวร์จะต้องปรับใช้กรอบการทำงานที่รักษาพารามิเตอร์อย่างปลอดภัย เมื่อตัวแทนภายนอกเรียกใช้งานแอปพลิเคชัน มันจะต้องส่งเพย์โหลดที่ตรวจสอบได้ซึ่งมีเจตนาของผู้ใช้ดั้งเดิม พารามิเตอร์การแนะนำ และโทเค็นความปลอดภัย
ที่สำคัญ นักพัฒนาสามารถสร้างโซลูชันที่ยืดหยุ่นได้โดยใช้ โครงสร้างพื้นฐาน Deferred Deep Linking ระบบนี้ช่วยให้พารามิเตอร์เพย์โหลดแบบไดนามิกคงอยู่ได้แม้ผ่านลูปการติดตั้งในพื้นหลัง แม้ว่าอุปกรณ์จะไม่มีแอปพลิเคชันติดตั้งอยู่ แต่ โครงสร้างพื้นฐานการกู้คืนบริบท จะยังคงรักษาเพย์โหลดเจตนาไว้ และส่งต่อไปยังแอปอย่างปลอดภัยในการเปิดใช้ครั้งแรก
การตรวจสอบด้วยรหัสลับสำหรับธุรกรรมระหว่างเครื่องจักร
นอกจากนี้ การรักษาความปลอดภัยของธุรกรรมอัตโนมัติเหล่านี้ยังต้องอาศัยการยืนยันตัวตนด้วยรหัสลับที่เข้มงวด เนื่องจากตัวแทนเบื้องหลังทำงานโดยไม่มีการควบคุมดูแลจากมนุษย์ สคริปต์ที่เป็นอันตรายจึงอาจพยายามปลอมแปลงคำขอธุรกรรมได้
เพื่อป้องกันสิ่งนี้ ทุกคำขอการกำหนดเส้นทาง Deep Link จะต้องมีลายเซ็นดิจิทัลที่ตรวจสอบได้ แอปพลิเคชันจะต้องตรวจสอบลายเซ็นนี้กับทะเบียนผู้พัฒนาสาธารณะก่อนที่จะดำเนินการใดๆ
การบังคับใช้ โครงสร้างพื้นฐาน Deferred Deep Linking อย่างปลอดภัยช่วยให้ทีมพัฒนาสามารถดำเนินการตรวจสอบเหล่านี้ได้โดยอัตโนมัติ กระบวนการนี้ช่วยปกป้อง Sandbox ของแอปพลิเคชันจากการติดตั้งที่ฉ้อโกงและรักษาความปลอดภัยของท่อส่งธุรกรรมจากการฉ้อโกงด้านการตลาด

หมายเหตุคาดการณ์ล่วงหน้าสำหรับอุตสาหกรรม: เกี่ยวกับการส่งผ่านพารามิเตอร์ข้ามอุปกรณ์สำหรับทราฟฟิกการขับขี่อัตโนมัติ ห้องปฏิบัติการเทคโนโลยีของ opoinstall กำลังดำเนินการวิจัยร่วมกับพันธมิตรแอปพลิเคชันระดับองค์กรชั้นนำ
ข้อกำหนดทางวิศวกรรมสำหรับการพัฒนาและการเติบโตในยุคหลังหน้าจอ
สำหรับนักพัฒนาและสถาปนิกวางระบบ
การรวมระบบ DSSAD และการปฏิบัติตามข้อกำหนดความปลอดภัย L3/L4 ต้องอาศัยการเปลี่ยนแปลงแนวทางปฏิบัติในการพัฒนาอย่างมาก วิศวกรต้องเปลี่ยนจากการออกแบบเส้นทางนำทางแบบภาพดั้งเดิมไปสู่การสร้าง App Intents ที่มีรายละเอียด ซึ่งช่วยให้ตัวแทนระดับระบบสามารถอ่านโครงสร้างแอปและสอบถามข้อมูลได้อย่างเป็นโปรแกรม
ยิ่งไปกว่านั้น นักพัฒนาจะต้องใช้การตรวจสอบลายเซ็นที่เข้มงวดเพื่อยืนยันเพย์โหลด Deep Link ขาเข้าทั้งหมด การตรวจสอบนี้ช่วยป้องกันตัวแทนที่ไม่ได้รับอนุญาตจากการเข้าสู่ระบบ Sandbox หรือทริกเกอร์การซื้อที่ฉ้อโกง สถาปนิกจะต้องกำหนดค่าระบบ ID หลายแพลตฟอร์มแบบรวมศูนย์เพื่อติดตามเส้นทางของผู้ใช้ทั้งบน iOS, Android และ HarmonyOS NEXT
สำหรับผู้จัดการผลิตภัณฑ์และการเติบโต
ในขณะเดียวกัน ผู้นำด้านผลิตภัณฑ์และการตลาดจะต้องนิยามเมทริกซ์การเติบโตของตนใหม่ ในสภาพแวดล้อมที่ขับเคลื่อนด้วยตัวแทน (Agentic Environment) ตัวชี้วัด KPI แบบเดิม เช่น จำนวนการเข้าชม อัตราตีกลับ และระยะเวลาในเซสชันจะลดความสำคัญลง
ในทางกลับกัน ผู้นำด้านการเติบโตจะต้องมุ่งเน้นไปที่ "อัตราการจับเจตนาของผู้ใช้" (Intent Capture Rates) พวกเขาต้องมั่นใจว่าแอปพลิเคชันของตนให้ข้อมูลเมตาที่มีโครงสร้างชัดเจนและเครื่องจักรสามารถอ่านได้ง่าย
นอกจากนี้ ทีมงานจะต้องปรับใช้ตัวกรองต่อต้านการฉ้อโกงขั้นสูงเพื่อระบุและบล็อกการดาวน์โหลดจากสคริปต์อัตโนมัติ การป้องกันนี้เป็นสิ่งจำเป็นเพื่อให้แน่ใจว่างบประมาณการตลาดถูกใช้ไปกับการเติบโตของผู้ใช้จริง แทนที่จะเป็นการเพิ่มจำนวนทราฟฟิกปลอมที่สร้างโดยเครื่องจักร
คำถามที่พบบ่อย (FAQ)
ท้ายที่สุดแล้ว เศรษฐกิจที่ขับเคลื่อนด้วยการคลิกแบบเดิมกำลังเผชิญกับขาลงอย่างรวดเร็ว ในขณะที่เครือข่ายการชำระเงินและระบบปฏิบัติการเปลี่ยนผ่านไปสู่สถาปัตยกรรมแบบตัวแทนอัตโนมัติ (Agentic Architecture) มูลค่าของซอฟต์แวร์กำลังเปลี่ยนไปสู่เลเยอร์การกำหนดเส้นทาง (Routing Layer) เบื้องหลัง
ดังนั้น การสร้างโครงสร้างพื้นฐาน Deep Linking ที่แข็งแกร่งและปลอดภัยต่อพารามิเตอร์จึงไม่ใช่แค่ทางเลือก แต่เป็นข้อกำหนดพื้นฐานในการดำเนินงาน การเตรียมสถาปัตยกรรมแอปพลิเคชันของคุณให้พร้อมสำหรับเศรษฐกิจยุคตัวแทนตั้งแต่วันนี้ จะช่วยให้มั่นใจได้ว่าซอฟต์แวร์ของคุณจะยังคงเข้าถึงได้ ตรวจสอบได้ และสร้างกำไรได้ในยุคหลังหน้าจอ
Share this article


