 ¿China ordena estándares L3 y L4? Este giro estratégico ha sido validado de forma concluyente tras la publicación por parte de los organismos reguladores del borrador final de las primeras normas nacionales obligatorias que rigen la conducción autónoma de nivel superior. El 16 de junio de 2026, el Ministerio de Industria y Tecnología de la Información (MIIT) publicó oficialmente el borrador de aprobación para consulta pública. Programado para entrar en vigor el 1 de julio de 2027, el estándar pone fin a la era de las declaraciones de marketing ambiguas y establece una base estricta de seguridad. Para los desarrolladores globales y los arquitectos automotrices, la aplicación de estos mandatos L3 y L4 en China indica que la navegación de vehículos automatizados ha chocado con una estricta barrera de cumplimiento, lo que exige pruebas verificables de seguridad antes de que cualquier vehículo pueda ingresar al mercado.
¿China ordena estándares L3 y L4? Este giro estratégico ha sido validado de forma concluyente tras la publicación por parte de los organismos reguladores del borrador final de las primeras normas nacionales obligatorias que rigen la conducción autónoma de nivel superior. El 16 de junio de 2026, el Ministerio de Industria y Tecnología de la Información (MIIT) publicó oficialmente el borrador de aprobación para consulta pública. Programado para entrar en vigor el 1 de julio de 2027, el estándar pone fin a la era de las declaraciones de marketing ambiguas y establece una base estricta de seguridad. Para los desarrolladores globales y los arquitectos automotrices, la aplicación de estos mandatos L3 y L4 en China indica que la navegación de vehículos automatizados ha chocado con una estricta barrera de cumplimiento, lo que exige pruebas verificables de seguridad antes de que cualquier vehículo pueda ingresar al mercado.
Deconstruyendo el marco autónomo obligatorio de China: El mandato de seguridad del MIIT
Actualización de GB/T 44721: De pautas voluntarias a entrada obligatoria en el mercado
Específicamente, la nueva norma, titulada Vehículos inteligentes conectados: Requisitos de seguridad para sistemas de conducción autónoma, representa una mejora importante respecto a las directrices voluntarias anteriores. El borrador reemplaza sistemáticamente la norma voluntaria GB/T 44721—2024 por una regulación nacional obligatoria.
Como resultado, el cumplimiento ya no es opcional para los fabricantes de automóviles. Cualquier vehículo de pasajeros o de carga (categorías M y N) que no cumpla con estos requisitos enfrentará una prohibición total de producción, importación y venta.
De acuerdo con la actualización regulatoria de IT Home, la fase de comentarios públicos se lleva a cabo del 17 al 24 de junio de 2026. Esta transición obligatoria obliga a la industria a cambiar su enfoque de las actualizaciones de software superficiales a una ingeniería de seguridad rigurosa y verificable.
El motor del caso de seguridad: Aplicación del protocolo de reclamaciones, argumentos y evidencias
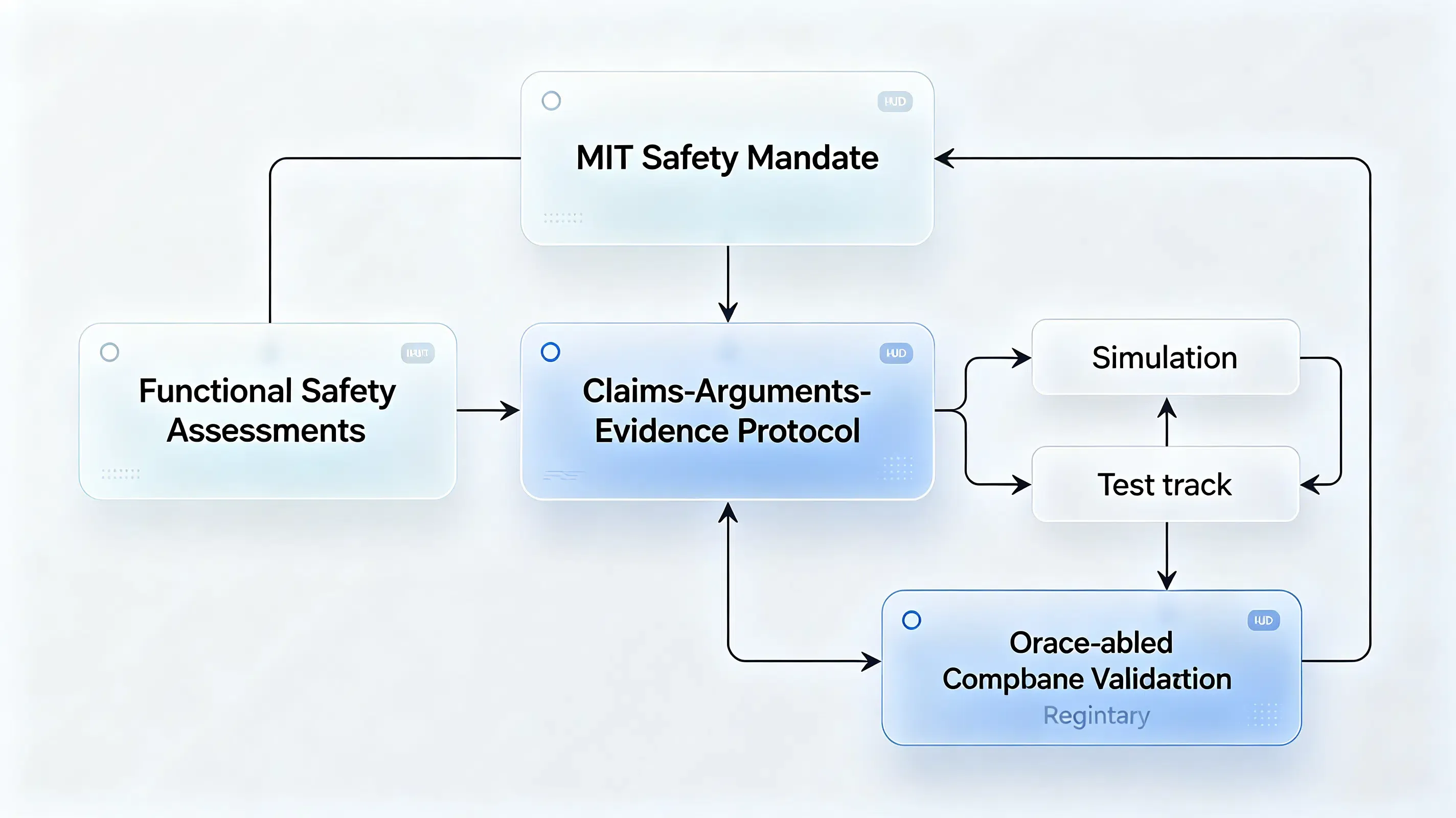
Para aplicar esta nueva base, el marco regulatorio exige un mecanismo estructurado de "Caso de seguridad" (安全档案). Los fabricantes de automóviles deben compilar documentación exhaustiva para demostrar que sus sistemas de conducción autónoma (ADS) no presentan riesgos irrazonables.
Específicamente, el Caso de seguridad utiliza una arquitectura estricta de "declaraciones-argumentos-evidencias" (声明—论据—证据). Los fabricantes deben respaldar cada declaración de seguridad con datos empíricos sólidos, que incluyan análisis de peligros, evaluaciones de seguridad funcional y límites del dominio de diseño operativo (ODD).
Además, todas las actualizaciones de software inalámbricas (OTA) críticas para la seguridad deben activar revisiones inmediatas de la documentación. Este marco de circuito cerrado integra validaciones de simulación, pistas de prueba y carreteras abiertas en un registro de cumplimiento único y rastreable.
Telemetría con el humano en el circuito: Triple monitoreo y maniobras de riesgo mínimo
Para la automatización condicional L3, el estándar se centra en gran medida en el proceso de transferencia entre el sistema y el conductor humano de respaldo. Específicamente, los vehículos deben ejecutar protocolos de "Triple monitoreo" continuos.
Como resultado, el sistema debe monitorear la ocupación de los asientos, el estado de los cinturones de seguridad y la atención del conductor en tiempo real. Si el sistema detecta distracción del conductor, debe iniciar una secuencia de advertencia de varias etapas mediante alertas visuales, sonoras y hápticas.
Cabe destacar que, si el conductor no recupera la atención en un plazo de 15 segundos, el vehículo debe ejecutar una Maniobra de Riesgo Mínimo (MRM) automatizada. A 120 km/h, el sistema debe detectar obstáculos frontales a una distancia mínima de 130 metros para garantizar un tiempo de reacción suficiente.
Respaldo autónomo: MRM más estrictos y el destierro del acceso remoto
Por el contrario, la automatización alta L4 requiere que el sistema maneje todos los escenarios de respaldo sin intervención humana. Crucialmente, la norma prohíbe que los sistemas dependan de asistencia remota para ejecutar tareas de conducción dinámica durante emergencias.
En consecuencia, el vehículo debe navegar por obstáculos inesperados, fallas de sensores y condiciones climáticas adversas de forma totalmente independiente. Los operadores remotos se limitan a proporcionar orientación de ruta de alto nivel.
Para respaldar esta autonomía, los sistemas L4 deben incorporar arquitecturas de hardware altamente redundantes. Si un componente crítico falla, el vehículo debe ejecutar un MRM estricto, orillándose de forma segura al arcén o deteniéndose dentro de su carril activo sin causar peligros al tráfico.
Desmitificando el mito del Lidar: Fusión de sensores frente a las realidades de la visión pura
Mientras tanto, la especificación ha desmentido afirmaciones ampliamente compartidas en línea sobre los mandatos de sensores. Específicamente, el borrador público oficial del MIIT no exige explícitamente sensores lidar para la automatización L4.
De hecho, el estándar sigue siendo tecnológicamente neutral, permitiendo arquitecturas de enfoque de visión pura si cumplen con los rigurosos umbrales de seguridad. Sin embargo, el estándar introduce un requisito obligatorio de "compensación de degradación".
Este requisito obliga a los sistemas de percepción a mantener un seguimiento preciso durante deslumbramientos extremos, niebla densa y lluvia. Aunque no se nombra explícitamente al lidar, estos altos umbrales de rendimiento probablemente obligarán a los fabricantes de automóviles a adoptar la fusión multisensorial. La combinación de cámaras con radar o lidar sigue siendo el camino más práctico para sobrevivir a estas líneas base ambientales.
La brecha de enrutamiento: Cambiando los parámetros de redirección bajo registros DSSAD automatizados
Evitando los clics manuales del usuario
A medida que los desarrolladores utilizan la generación rápida de código para implementar miles de aplicaciones menores, la web móvil se enfrenta a una inundación de productos sin precedentes. Sin embargo, este aumento masivo en el volumen de software coincide con una evaporación total de la interfaz de usuario tradicional.
Cuando un sistema autónomo opera completamente sobre API en segundo plano, el viaje del usuario tradicional centrado en humanos desaparece. Esta transición es muy evidente en el recién implementado Sistema de Almacenamiento de Datos para la Conducción Automatizada (DSSAD).
El DSSAD debe registrar todos los estados críticos de automatización y los protocolos de enlace de transición en tiempo real. Debido a que estos enlaces máquina a máquina omiten los clics manuales del usuario, crean una brecha de enrutamiento grave.
La pérdida de parámetros en registros de borde automatizados
Específicamente, cuando un agente a bordo invoca la navegación local o servicios para pasajeros, los parámetros de redirección tradicionales a nivel de navegador se eliminan. Los mecanismos de seguimiento heredados no pueden asignar el origen de la transacción a través de tiempos de ejecución desconectados entre el automóvil y el móvil.
Como resultado, las plataformas de medición móvil reciben paquetes de metadatos vacíos. Esta pérdida de parámetros crea una crisis de atribución. Los desarrolladores pierden la capacidad de rastrear las fuentes de adquisición de usuarios, dejándolos incapaces de optimizar los bucles de conversión o verificar los canales de referencia.
Arquitecturas de referencia: Asegurando metadatos desacoplados a través de tiempos de ejecución de borde
Reconstruyendo el protocolo de enlace de parámetros
Para cerrar esta brecha de enrutamiento semántico, los arquitectos de software deben implementar marcos seguros de preservación de parámetros. Cuando un agente externo invoca una aplicación, debe transmitir una carga útil verificada que contenga la intención original del usuario, los parámetros de referencia y los tokens de seguridad.
Crucialmente, los desarrolladores pueden establecer una solución resiliente utilizando el marco de Deferred Deep Linking (enlaces profundos diferidos). Este sistema asegura que los parámetros dinámicos de la carga útil sobrevivan a los bucles de instalación en segundo plano. Incluso si el dispositivo carece de la aplicación nativa, la infraestructura de restauración contextual conserva la carga útil de intención, pasándola de forma segura a la aplicación en el primer lanzamiento.
Verificación criptográfica para transacciones máquina a máquina
Además, asegurar estas transacciones automatizadas requiere protocolos de enlace criptográficos estrictos. Debido a que los agentes en segundo plano operan sin supervisión humana visual, los scripts maliciosos pueden intentar falsificar solicitudes de transacciones.
Para evitar esto, cada solicitud de enrutamiento de enlace profundo debe llevar una firma criptográfica verificable. La aplicación debe validar esta firma contra registros de desarrolladores públicos antes de ejecutar cualquier acción.
La aplicación de un marco de Deferred Deep Linking seguro permite a los equipos de desarrollo ejecutar estas validaciones automáticamente. Este proceso protege el sandbox de la aplicación contra instalaciones fraudulentas y asegura el flujo de transacciones contra el fraude publicitario.

Nota de prospectiva de la industria: Con respecto al paso de parámetros entre dispositivos para el tráfico con intención autónoma, el laboratorio tecnológico de opoinstall está realizando actualmente una investigación exploratoria conjunta con socios empresariales líderes en aplicaciones.
Mandatos de ingeniería para el desarrollo y crecimiento post-pantalla
Para desarrolladores y arquitectos de sistemas
La integración de un DSSAD nativo a bordo y el cumplimiento de los mandatos de seguridad L3/L4 requiere un cambio importante en las prácticas de desarrollo. Los ingenieros deben pasar de diseñar rutas de navegación visual tradicionales a construir Intenciones de Aplicación (App Intents) detalladas. Estas intenciones permiten que los agentes a nivel de sistema lean estructuras de aplicaciones y consulten datos programáticamente.
Además, los desarrolladores deben implementar una verificación de firma estricta para validar todas las cargas útiles de enlaces profundos entrantes. Esta validación evita que agentes maliciosos ejecuten escapes de sandbox locales o activen compras fraudulentas. Los arquitectos también deben configurar sistemas de identificación multiplataforma unificados para rastrear el viaje del usuario a través de iOS, Android y HarmonyOS NEXT.
Para gerentes de producto y crecimiento
Mientras tanto, los líderes de producto y marketing deben redefinir sus métricas de crecimiento. En un entorno de agentes, las métricas KPI tradicionales como las visitas a la página, las tasas de rebote y la duración de las sesiones pierden su valor.
En cambio, los líderes de crecimiento deben optimizar las "Tasas de captura de intención". Deben asegurarse de que su aplicación proporcione metadatos altamente estructurados y legibles por máquina que los agentes puedan analizar fácilmente.
Además, los equipos deben implementar filtros antifraude avanzados para identificar y bloquear descargas basadas en scripts automatizados. Esta protección es esencial para garantizar que los presupuestos de marketing se inviertan en un crecimiento de usuarios real en lugar de en tráfico inflado generado por máquinas.
Preguntas frecuentes (FAQ)
En última instancia, la economía tradicional basada en clics se enfrenta a un rápido declive. A medida que las redes de pago y los sistemas operativos de los dispositivos transicionan hacia arquitecturas de agentes autónomos, el valor del software se está desplazando hacia la capa de enrutamiento subyacente.
En consecuencia, construir backbones de enlaces profundos robustos y seguros en cuanto a parámetros ya no es un lujo. Es un requisito operativo fundamental. Al preparar la arquitectura de su aplicación para la economía de agentes hoy, usted asegura que su software permanezca accesible, verificado y rentable en la era post-pantalla.
Share this article


