 La Chine impose les normes L3 et L4 ? Ce pivot stratégique a été validé de manière concluante avec la publication, par les agences de régulation, du projet final des premières normes nationales obligatoires encadrant la conduite autonome de haut niveau. Le 16 juin 2026, le ministère de l'Industrie et des Technologies de l'information (MIIT) a officiellement publié le projet d'approbation pour consultation publique. Prévue pour le 1er juillet 2027, cette norme met fin à l'ère des promesses marketing vagues et instaure un socle strict en matière de sécurité. Pour les développeurs mondiaux et les concepteurs automobiles, l'application de ces mandats L3 et L4 en Chine indique que la navigation automatisée des véhicules a atteint un seuil de conformité rigoureux, exigeant désormais des preuves vérifiables de sécurité avant toute mise sur le marché.
La Chine impose les normes L3 et L4 ? Ce pivot stratégique a été validé de manière concluante avec la publication, par les agences de régulation, du projet final des premières normes nationales obligatoires encadrant la conduite autonome de haut niveau. Le 16 juin 2026, le ministère de l'Industrie et des Technologies de l'information (MIIT) a officiellement publié le projet d'approbation pour consultation publique. Prévue pour le 1er juillet 2027, cette norme met fin à l'ère des promesses marketing vagues et instaure un socle strict en matière de sécurité. Pour les développeurs mondiaux et les concepteurs automobiles, l'application de ces mandats L3 et L4 en Chine indique que la navigation automatisée des véhicules a atteint un seuil de conformité rigoureux, exigeant désormais des preuves vérifiables de sécurité avant toute mise sur le marché.
Déconstruction du cadre obligatoire chinois sur l'autonomie : Le mandat de sécurité du MIIT
Mise à niveau de la norme GB/T 44721 : De lignes directrices volontaires à l'entrée obligatoire sur le marché
Plus précisément, la nouvelle norme, intitulée Véhicules intelligents connectés – Exigences de sécurité pour les systèmes de conduite autonome, constitue une évolution majeure par rapport aux directives volontaires antérieures. Le projet remplace systématiquement la norme volontaire GB/T 44721—2024 par une réglementation nationale obligatoire.
En conséquence, la conformité n'est plus facultative pour les constructeurs. Tout véhicule particulier ou utilitaire (catégories M et N) ne respectant pas ces exigences fera l'objet d'une interdiction totale de production, d'importation et de vente.
Selon la mise à jour réglementaire d'IT Home, la phase de consultation publique se déroule du 17 au 24 juin 2026. Cette transition obligatoire force l'industrie à délaisser les mises à jour logicielles superficielles au profit d'une ingénierie de sécurité rigoureuse et vérifiable.
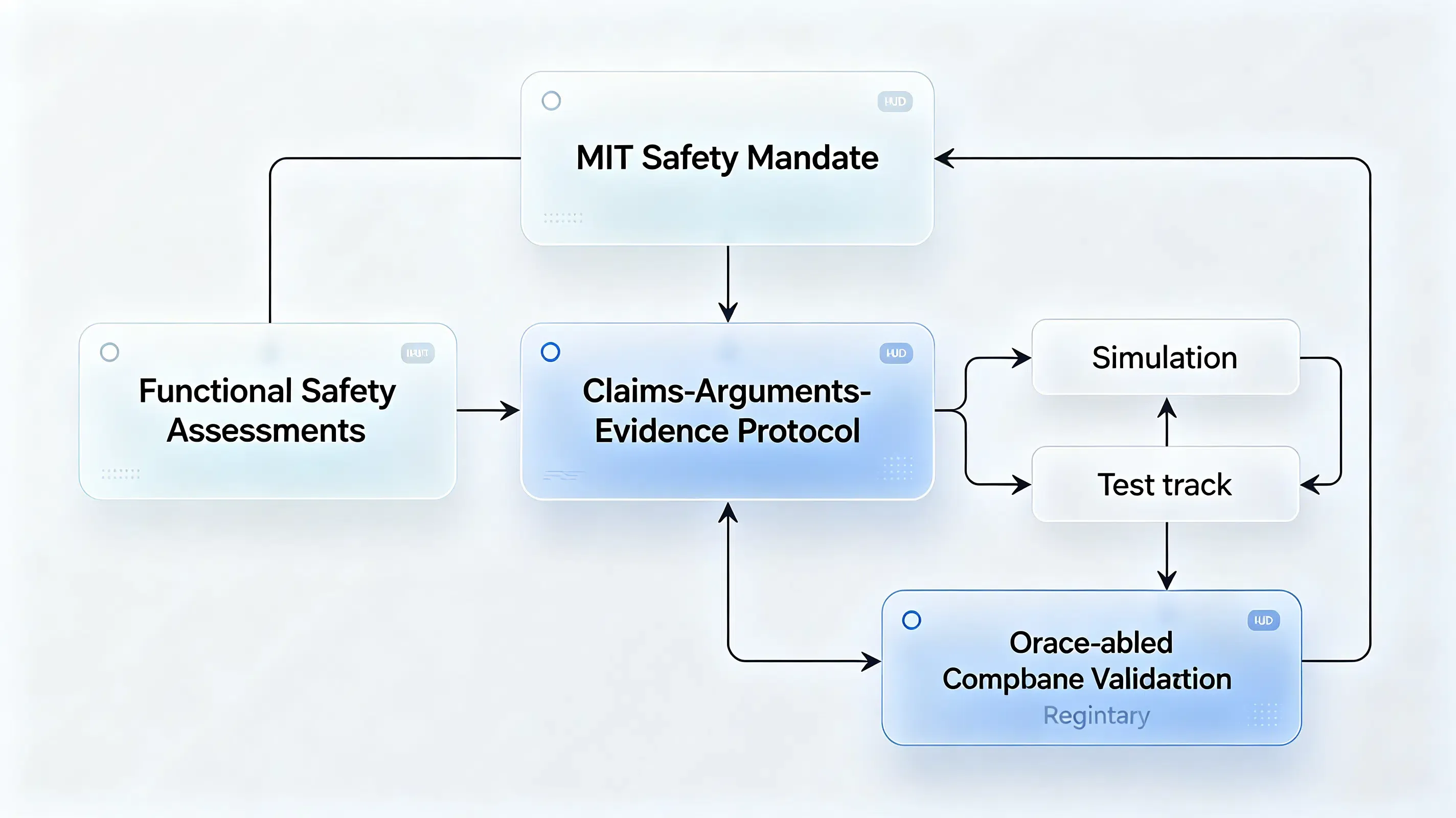
Le moteur de sécurité (Safety Case) : Application du protocole « Revendications-Arguments-Preuves »
Pour faire respecter cette nouvelle base, le cadre réglementaire impose un mécanisme structuré de « Safety Case » (dossier de sécurité). Les constructeurs doivent compiler une documentation exhaustive démontrant que leurs systèmes de conduite autonome (ADS) ne présentent aucun risque déraisonnable.
Le Safety Case utilise spécifiquement une architecture stricte de « revendications—arguments—preuves » (声明—论据—证据). Les constructeurs doivent étayer chaque revendication de sécurité par des données empiriques solides, incluant l'analyse des risques, les évaluations de sécurité fonctionnelle et les limites du domaine de conception opérationnel (ODD).
En outre, toutes les mises à jour logicielles critiques effectuées par transmission sans fil (OTA) doivent entraîner une révision immédiate de la documentation. Ce cadre en boucle fermée intègre les simulations, les essais sur piste et les validations sur route réelle au sein d'un registre de conformité unique et traçable.
Télémétrie avec humain dans la boucle : Triple surveillance et manœuvres à risque minimal
Pour l'automatisation conditionnelle L3, la norme se concentre fortement sur le processus de transfert de contrôle entre le système et le conducteur de secours humain. Concrètement, les véhicules doivent exécuter des protocoles de « Triple Surveillance » en continu.
Le système doit donc surveiller en temps réel l'occupation du siège, le statut de la ceinture de sécurité et l'attention du conducteur. Si le système détecte une inattention du conducteur, il doit déclencher une séquence d'avertissement multi-étapes combinant alertes visuelles, sonores et haptiques.
Notamment, si le conducteur ne retrouve pas son attention dans les 15 secondes, le véhicule doit exécuter une manœuvre à risque minimal (MRM) automatisée. À 120 km/h, le système doit détecter les obstacles à l'avant à une distance minimale de 130 mètres pour garantir un temps de réaction suffisant.
Repli autonome : MRM plus strict et bannissement de la téléopération
À l'inverse, l'automatisation de haut niveau L4 exige que le système gère tous les scénarios de repli sans intervention humaine. La norme interdit formellement aux systèmes de compter sur une assistance à distance pour effectuer des tâches de conduite dynamique en cas d'urgence.
Le véhicule doit donc naviguer de manière totalement indépendante face aux obstacles imprévus, aux défaillances de capteurs et aux conditions météorologiques défavorables. Les opérateurs à distance sont limités à fournir des guidages d'itinéraire de haut niveau.
Pour soutenir cette autonomie, les systèmes L4 doivent intégrer des architectures matérielles hautement redondantes. En cas de défaillance d'un composant critique, le véhicule doit exécuter une procédure de MRM stricte, se garant en sécurité sur l'accotement ou s'arrêtant sur sa voie sans provoquer de risques pour la circulation.
Démystifier le mythe du LiDAR : Fusion de capteurs contre réalité de la vision pure
Parallèlement, ces spécifications ont réfuté des affirmations largement diffusées en ligne concernant les capteurs obligatoires. Plus précisément, le projet public officiel du MIIT n'impose pas explicitement de capteurs LiDAR pour l'automatisation L4.
En fait, la norme reste neutre sur le plan technologique, autorisant les architectures basées sur la vision pure si elles atteignent les seuils de sécurité rigoureux. Cependant, la norme introduit une exigence obligatoire de « compensation de dégradation ».
Cette exigence oblige les systèmes de perception à maintenir un suivi précis malgré un éblouissement intense, un brouillard épais ou de fortes pluies. Bien que le LiDAR ne soit pas explicitement nommé, ces seuils de haute performance pousseront probablement les constructeurs à adopter une fusion multi-capteurs. Combiner caméras et radar ou LiDAR demeure la méthode la plus pratique pour respecter ces références environnementales.
Le fossé de routage : Paramètres de redirection sous les registres DSSAD automatisés
Contourner les clics utilisateur manuels
Alors que les développeurs utilisent la génération rapide de code pour déployer des milliers d'applications mineures, le web mobile fait face à un afflux sans précédent de produits. Toutefois, cette augmentation massive du volume logiciel coïncide avec une disparition totale de l'interface utilisateur traditionnelle.
Lorsqu'un système autonome fonctionne entièrement via des API en arrière-plan, le parcours utilisateur traditionnel centré sur l'humain disparaît. Cette transition est flagrante dans le système de stockage de données pour la conduite automatisée (DSSAD), désormais obligatoire.
Le DSSAD doit enregistrer en temps réel tous les états d'automatisation critiques et les échanges de transfert de contrôle. Puisque ces échanges machine-à-machine contournent les clics manuels, ils créent un sérieux fossé de routage.
Perte de paramètres dans les journaux de bord automatisés
Plus précisément, lorsqu'un agent embarqué déclenche une navigation locale ou des services aux passagers, les paramètres de redirection classiques au niveau du navigateur sont supprimés. Les mécanismes de suivi hérités ne peuvent plus corréler l'origine de la transaction avec les environnements d'exécution mobiles découplés.
Par conséquent, les plateformes de mesure mobile reçoivent des paquets de métadonnées vides. Cette perte de paramètres engendre une crise d'attribution. Les développeurs perdent la capacité de suivre les sources d'acquisition des utilisateurs, les empêchant d'optimiser les boucles de conversion ou de vérifier les canaux de référence.
Architectures de référence : Sécuriser les métadonnées découplées à travers les environnements d'exécution
Reconstruire l'échange de paramètres
Pour combler ce fossé de routage sémantique, les architectes logiciels doivent déployer des cadres sécurisés de préservation des paramètres. Lorsqu'un agent externe invoque une application, il doit transmettre une charge utile vérifiée contenant l'intention initiale de l'utilisateur, les paramètres de référence et les jetons de sécurité.
Il est crucial pour les développeurs d'établir une solution résiliente en utilisant le cadre Deferred Deep Linking (Deep Linking Différé). Ce système garantit que les paramètres dynamiques survivent aux boucles d'installation en arrière-plan. Même si l'appareil ne possède pas l'application native, l'infrastructure de restauration contextuelle préserve les données d'intention, les transmettant en toute sécurité à l'application lors du premier lancement.
Vérification cryptographique pour les transactions machine-à-machine
De plus, la sécurisation de ces transactions automatisées exige des échanges cryptographiques rigoureux. Puisque les agents en arrière-plan opèrent sans supervision humaine visuelle, des scripts malveillants pourraient tenter d'usurper des demandes de transaction.
Pour éviter cela, chaque demande de routage par lien profond doit comporter une signature cryptographique vérifiable. L'application doit valider cette signature auprès de registres de développeurs publics avant d'exécuter toute action.
L'application d'un cadre Deferred Deep Linking sécurisé permet aux équipes de développement d'automatiser ces validations. Ce processus protège le sandbox de l'application contre les installations frauduleuses et sécurise le pipeline de transaction contre les fraudes publicitaires.

Note prospective de l'industrie : Concernant le passage de paramètres inter-appareils pour le trafic d'intention autonome, le laboratoire technologique de opoinstall mène actuellement des recherches exploratoires conjointes avec des partenaires d'applications d'entreprise de premier plan.
Mandats d'ingénierie pour le développement et la croissance post-écran
Pour les développeurs et architectes systèmes
L'intégration d'un DSSAD embarqué natif et le respect des mandats de sécurité L3/L4 nécessitent un changement majeur dans les pratiques de développement. Les ingénieurs doivent passer de la conception de parcours de navigation visuelle traditionnels à la construction d'intentions d'application (App Intents) détaillées. Ces intentions permettent aux agents au niveau du système de lire les structures d'application et d'interroger les données par programmation.
Par ailleurs, les développeurs doivent mettre en œuvre une vérification stricte des signatures pour valider toutes les charges utiles des liens profonds entrants. Cette validation empêche les agents malveillants d'échapper au sandbox local ou de déclencher des achats frauduleux. Les architectes doivent également configurer des systèmes d'identification multi-plateformes unifiés pour suivre le parcours utilisateur sur iOS, Android et HarmonyOS NEXT.
Pour les responsables produit et croissance
Pendant ce temps, les responsables produit et marketing doivent redéfinir leurs mesures de croissance. Dans un environnement piloté par des agents, les indicateurs clés de performance (KPI) traditionnels comme les pages vues, le taux de rebond et la durée de session perdent leur pertinence.
Au lieu de cela, les responsables croissance doivent optimiser les « taux de capture d'intention ». Ils doivent s'assurer que leur application fournit des métadonnées hautement structurées et lisibles par machine que les agents peuvent interpréter facilement.
De plus, les équipes doivent déployer des filtres anti-fraude avancés pour identifier et bloquer les téléchargements basés sur des scripts automatisés. Cette protection est essentielle pour garantir que les budgets marketing soient investis dans la croissance réelle des utilisateurs plutôt que dans un trafic généré artificiellement par des machines.
Foire aux questions (FAQ)
En fin de compte, l'économie traditionnelle basée sur le clic décline rapidement. Alors que les réseaux de paiement et les systèmes d'exploitation des appareils migrent vers des architectures d'agents autonomes, la valeur du logiciel se déplace vers la couche de routage sous-jacente.
Par conséquent, construire des backbones de liens profonds robustes et sécurisés au niveau des paramètres n'est plus un luxe, mais une exigence opérationnelle fondamentale. En préparant dès aujourd'hui l'architecture de votre application pour l'économie des agents, vous garantissez que votre logiciel restera accessible, vérifié et rentable à l'ère post-écran.
Share this article


