 China Orders L3 L4 Standards? This strategic pivot has been conclusively validated as regulatory agencies publish the final draft of the country’s first compulsory national standards governing higher-level autonomous driving. On June 16, 2026, the Ministry of Industry and Information Technology (MIIT) officially released the approval draft for public consultation. Slated for implementation on July 1, 2027, the standard ends the era of vague marketing claims and establishes a strict safety baseline. For global developers and automotive architects, the enforcement of these China Orders L3 L4 mandates indicates that automated vehicle navigation has hit a strict compliance wall, requiring verifiable evidence of safety before any vehicle can enter the market.
China Orders L3 L4 Standards? This strategic pivot has been conclusively validated as regulatory agencies publish the final draft of the country’s first compulsory national standards governing higher-level autonomous driving. On June 16, 2026, the Ministry of Industry and Information Technology (MIIT) officially released the approval draft for public consultation. Slated for implementation on July 1, 2027, the standard ends the era of vague marketing claims and establishes a strict safety baseline. For global developers and automotive architects, the enforcement of these China Orders L3 L4 mandates indicates that automated vehicle navigation has hit a strict compliance wall, requiring verifiable evidence of safety before any vehicle can enter the market.
Deconstructing China’s Compulsory Autonomous Framework: The MIIT Safety Mandate
Upgrading GB/T 44721: From Voluntary Guidelines to Compulsory Market Entry
Specifically, the new standard, titled Intelligent Connected Vehicles – Safety Requirements for Autonomous Driving Systems, represents a major upgrade of previous voluntary guidelines. The draft systematically replaces the voluntary GB/T 44721—2024 standard with a compulsory national regulation.
Consequently, compliance is no longer optional for automakers. Any passenger or cargo vehicle (M and N categories) failing to satisfy these requirements will face a complete ban on production, import, and sale.
According to IT Home’s regulatory update, the public comment phase runs from June 17 to June 24, 2026. This mandatory transition forces the industry to shift its focus from superficial software updates to rigorous, verifiable security engineering.
The Safety Case Engine: Enforcing the Claims-Arguments-Evidence Protocol
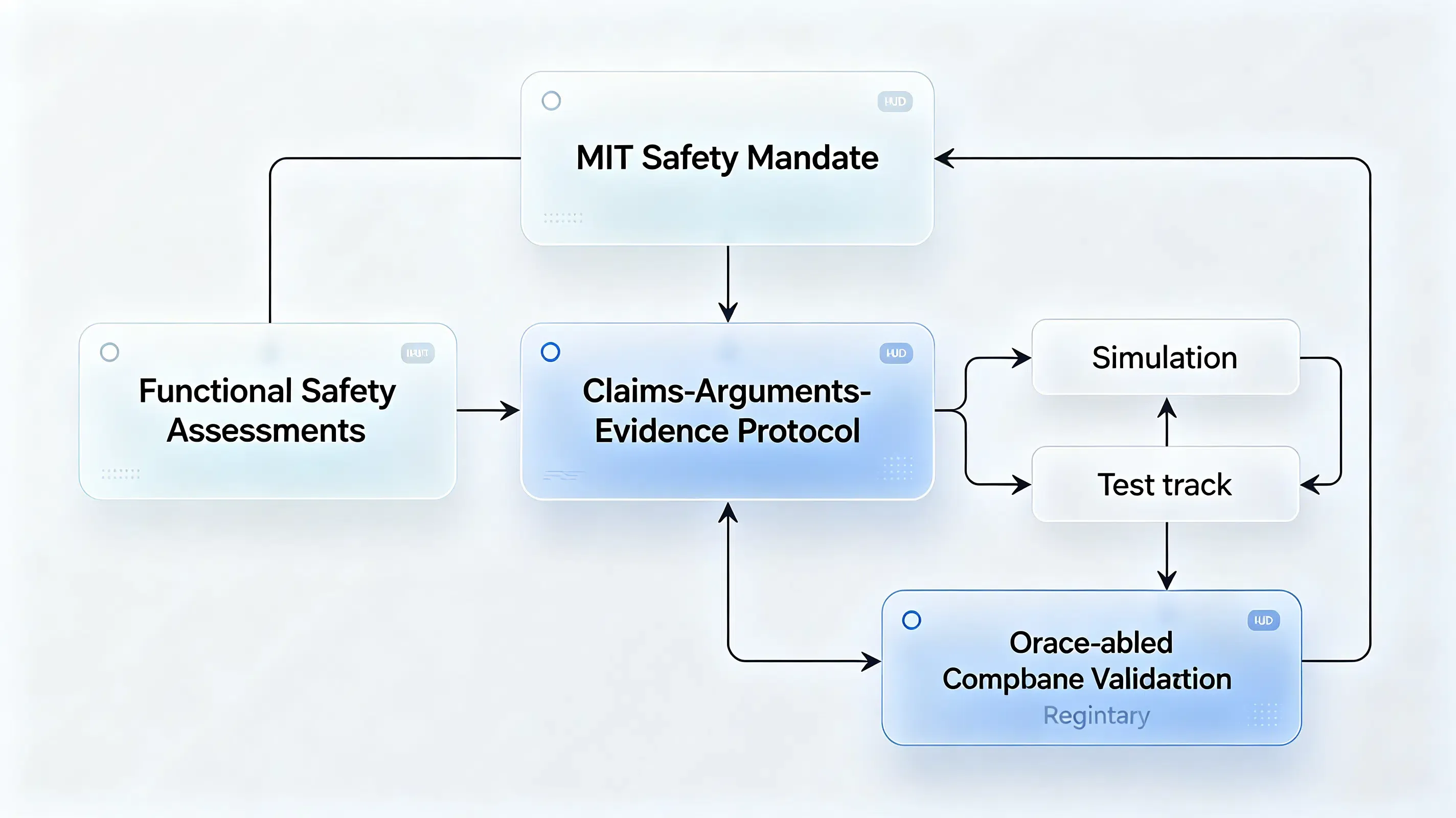
To enforce this new baseline, the regulatory framework mandates a structured “Safety Case” (安全档案) mechanism. Automakers must compile comprehensive documentation to demonstrate that their autonomous driving systems (ADS) present no unreasonable risks.
Specifically, the Safety Case utilizes a strict “claims-arguments-evidence” (声明—论据—证据) architecture. Automakers must back every safety claim with hard empirical data, including hazard analysis, functional safety assessments, and operational design domain (ODD) boundaries.
Furthermore, all safety-critical over-the-air (OTA) software updates must trigger immediate documentation revisions. This closed-loop framework integrates simulation, test track, and open-road validations into a single traceable compliance registry.
Human-in-the-Loop Telemetry: Triple Monitoring and Minimum Risk Maneuvers
For L3 conditional automation, the standard focuses heavily on the hand-over process between the system and the human fallback driver. Specifically, vehicles must run continuous “Triple Monitoring” protocols.
Consequently, the system must monitor seat occupancy, seatbelt status, and driver attention in real time. If the system detects driver distraction, it must initiate a multi-stage warning sequence using visual, audio, and haptic alerts.
Notably, if the driver fails to regain attentiveness within 15 seconds, the vehicle must execute an automated Minimum Risk Maneuver (MRM). At 120 km/h, the system must detect forward obstacles at a minimum distance of 130 meters to ensure sufficient reaction time.
Autonomous Fallback: Stricter MRM and the Banishment of Remote Egress
In contrast, L4 high automation requires the system to handle all fallback scenarios without human intervention. Crucially, the standard prohibits systems from relying on remote assistance to execute dynamic driving tasks during emergencies.
Consequently, the vehicle must navigate unexpected obstacles, sensor failures, and adverse weather conditions completely independently. Remote operators are limited to providing high-level route guidance.
To support this autonomy, L4 systems must incorporate highly redundant hardware architectures. If a critical component fails, the vehicle must execute a strict MRM, pulling over safely to the shoulder or stopping within its active lane without causing traffic hazards.
Debunking the Lidar Myth: Sensor Fusion vs. Pure-Vision Realities
Meanwhile, the specification has debunked widely shared online claims regarding sensor mandates. Specifically, the official MIIT public draft does not explicitly mandate lidar sensors for L4 automation.
In fact, the standard remains technology-neutral, allowing pure-vision approach architectures if they meet the rigorous safety thresholds. However, the standard introduces a mandatory “degradation compensation” requirement.
This requirement forces perception systems to maintain accurate tracking during extreme glare, heavy fog, and rain. While lidar is not explicitly named, these high performance thresholds will likely compel automakers to adopt multi-sensor fusion. Combining cameras with radar or lidar remains the most practical path to survive these environmental baselines.
The Routing Gap: Shifting Redirection Parameters Under Automated DSSAD Registries
Bypassing Manual User Clicks
As developers utilize rapid code generation to deploy thousands of minor applications, the mobile web faces an unprecedented product flood. However, this massive increase in software volume coincides with a complete evaporation of the traditional user interface.
When an autonomous system operates entirely on background APIs, the traditional human-focused user journey disappears. This transition is highly evident in the newly mandated Data Storage System for Automated Driving (DSSAD).
The DSSAD must record all critical automation states and transition handshakes in real time. Because these machine-to-machine handshakes bypass manual user clicks, they create a severe routing gap.
The Parameters Loss in Automated Edge Logs
Specifically, when an on-board agent invokes local navigation or passenger services, traditional browser-level redirection parameters are stripped. Legacy tracking mechanisms cannot map the transaction origin across decoupled car-to-mobile runtimes.
As a result, mobile measurement platforms receive empty metadata packages. This parameters loss creates an attribution crisis. Developers lose the ability to track user acquisition sources, leaving them unable to optimize conversion loops or verify referral channels.
Reference Architectures: Securing Decoupled Metadata Across Edge Runtimes
Rebuilding the Parameter Handshake
To bridge this semantic routing gap, software architects must deploy secure parameter-preservation frameworks. When an external agent invokes an application, it must transmit a verified payload containing the user’s original intent, referral parameters, and security tokens.
Crucially, developers can establish a resilient solution using the Deferred Deep Linking framework. This system ensures that dynamic payload parameters survive background installation loops. Even if the device lacks the native application, the contextual restoration infrastructure preserves the intent payload, passing it securely to the app upon first launch.
Cryptographic Verification for Machine-to-Machine Transactions
Additionally, securing these automated transactions requires strict cryptographic handshakes. Because background agents operate without visual human supervision, malicious scripts can attempt to spoof transaction requests.
To prevent this, every deep link routing request must carry a verifiable cryptographic signature. The application must validate this signature against public developer registries before executing any action.
Enforcing a secure Deferred Deep Linking framework allows development teams to execute these validations automatically. This process protects the application sandbox from fraudulent installations and secures the transaction pipeline against ad fraud.

Industry Forward-looking Note: Regarding cross-device parameter passing for autonomous intent traffic, opoinstall’s tech lab is currently conducting joint exploratory research with leading enterprise App partners.
Engineering Mandates for Post-Screen Development and Growth
For Developers and System Architects
Integrating a native on-board DSSAD and meeting L3/L4 safety mandates requires a major shift in development practices. Engineers must transition from designing traditional visual navigation paths to constructing detailed App Intents. These intents allow system-level agents to read app structures and query data programmatically.
Furthermore, developers must implement strict signature verification to validate all incoming deep link payloads. This validation prevents rogue agents from executing local sandbox escapes or triggering fraudulent purchases. Architects must also configure unified multi-platform ID systems to track the user journey across iOS, Android, and HarmonyOS NEXT.
For Product and Growth Managers
Meanwhile, product and marketing leads must redefine their growth metrics. In an agentic environment, traditional KPI metrics like page views, bounce rates, and session lengths lose their value.
Instead, growth leads must optimize for “Intent Capture Rates”. They must ensure their application provides highly structured, machine-readable metadata that agents can parse easily.
Additionally, teams must deploy advanced anti-fraud filters to identify and block automated script-based downloads. This protection is essential to ensure that marketing budgets are spent on real user growth rather than inflated, machine-generated traffic.
Frequently Asked Questions (FAQ)
Ultimately, the traditional click-based economy is facing a rapid decline. As payment networks and device operating systems transition to autonomous agentic architectures, the value of software is shifting to the underlying routing layer.
Consequently, building robust, parameter-secure deep linking backbones is no longer a luxury. It is a baseline operational requirement. By preparing your application architecture for the agentic economy today, you ensure your software remains accessible, verified, and profitable in the post-screen era.
Share this article



